Project Overview
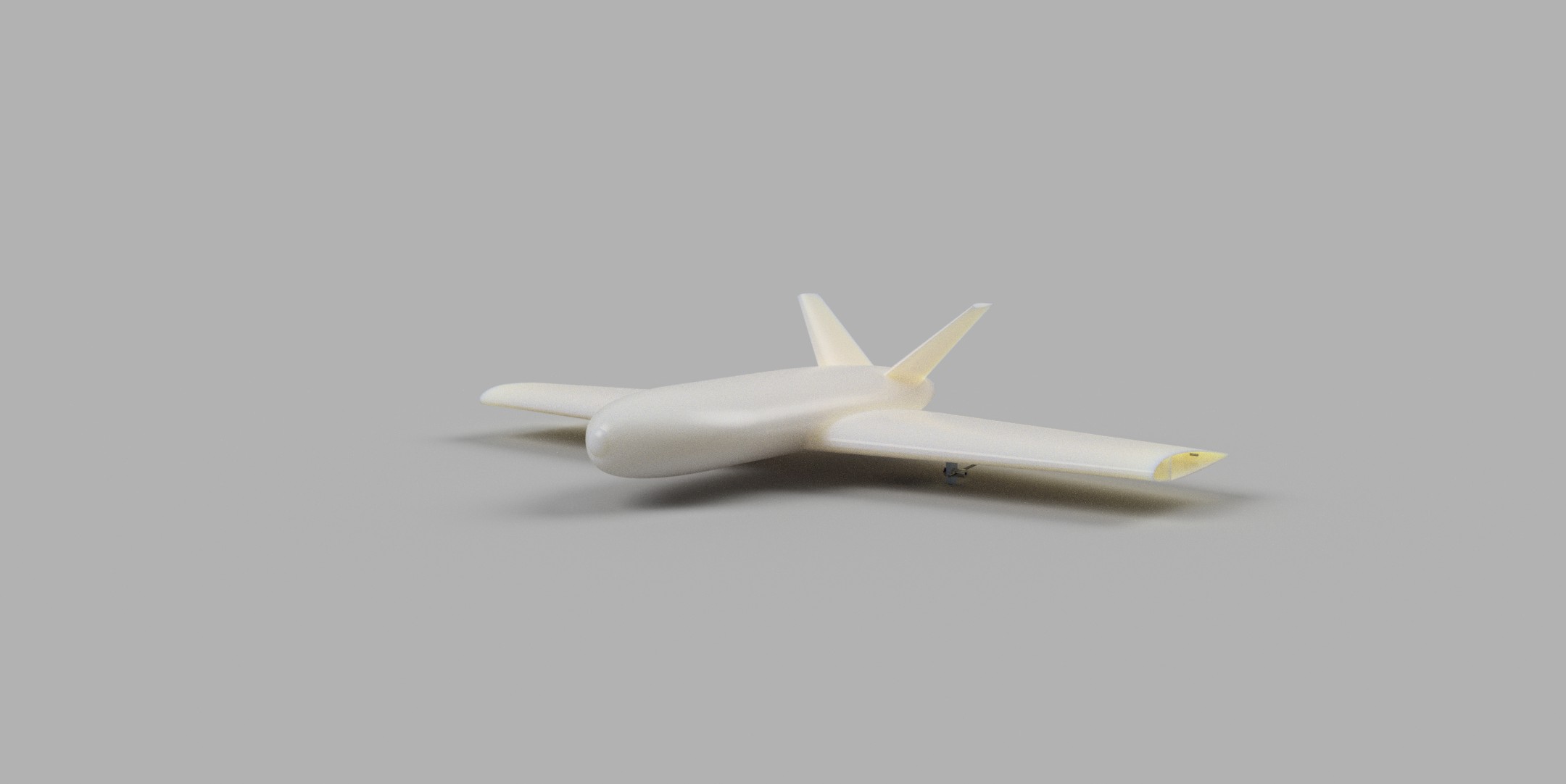
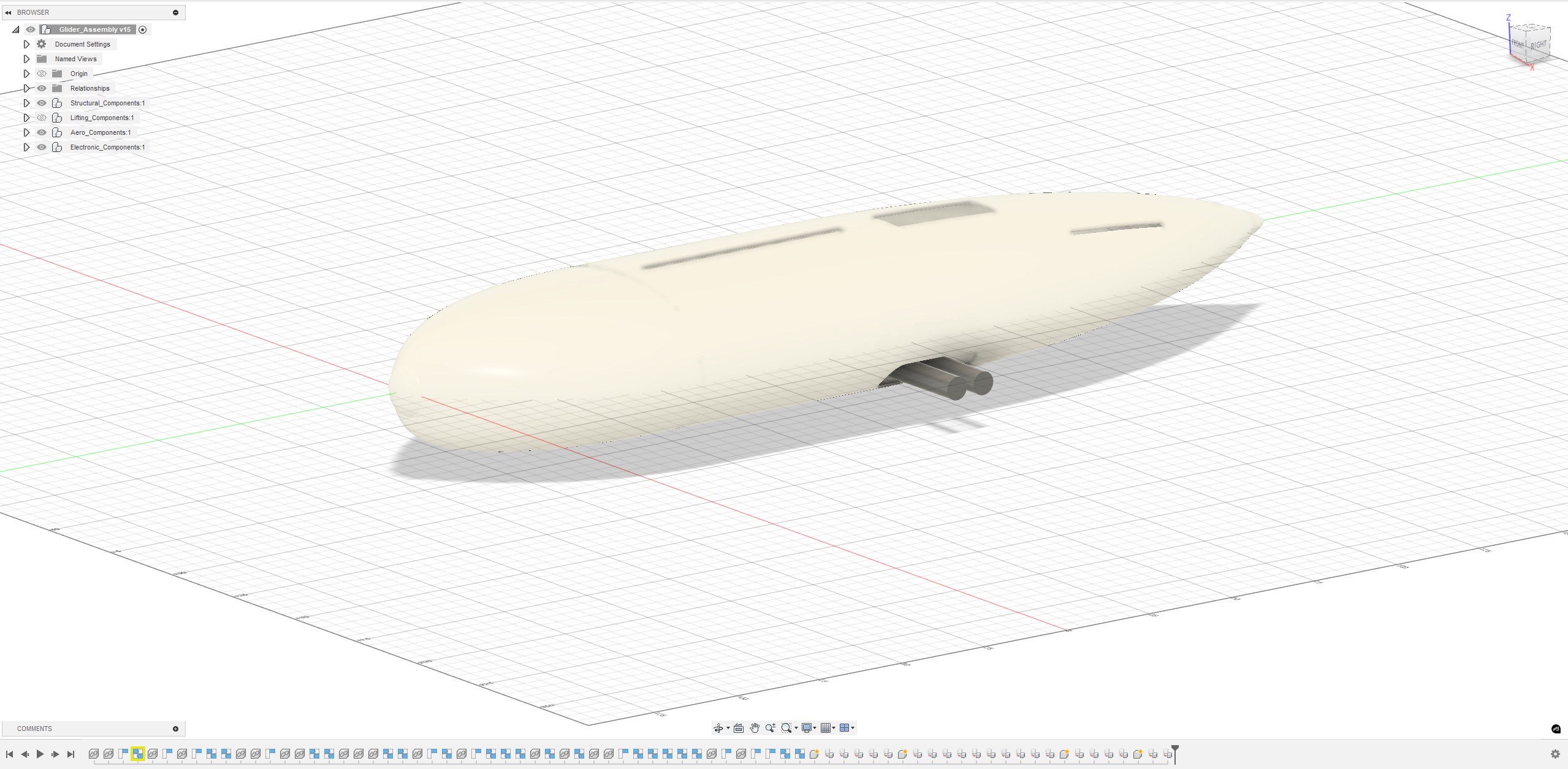
This UAV was developed for the AIAA Design Build Fly 24/25 Competition to be remotely deployed from a mothership aircraft and autonomously land in a designated zone. The primary requirements for the autonomous glider were that it had to be under 250 grams and had to be fully autonomous (no ground control). The design, manufacturing, and testing process for developing the 3D Printed Test UAV was utilized for the development of the autonomous glider. This process resulted in a first successful test flight being approximately one month from the creation of the initial conceptual design for the airframe.